Agrox
自主化无农药病虫害管理

深入理解
核心挑战。
我们对 5 家小规模有机农场进行了实地访谈——4 家位于福赛斯公园农贸市场,1 家在南卡罗来纳州——以了解农民在日常工作中如何识别和应对病虫害问题。我们重点关注四个问题:当前痛点、如何判断作物状况、使用哪些工具,以及是否愿意接受技术介入。
农贸市场农场
农场

福赛斯公园农贸市场

农产品上可见的虫害损伤

南卡罗来纳州农场实地走访
环境污染问题
我们最初认为小型有机农场最头疼的是土壤污染、水土流失和农药法规——这些话题在农业政策讨论中频繁出现。
病虫害管理
我们采访的每一位农民都在前几分钟内主动提到了病虫害——没有任何引导。真正的危机不是合规问题,而是每天不可预测地在没有化学工具的情况下保护作物。
这次转向至关重要。如果我们按照原有假设设计,会做出一个合规或报告工具——解决的是农民并不迫切的问题。实地研究迫使我们重新定义整个设计命题。
农民告诉我们的
“对,有很多风险,比如虫害。有时候我们就……只能用手把虫子一个个摘掉。”
→ 手工摘虫是默认做法——不是选择,而是最后的手段。
“我们用有机的东西——印楝油、苏云金杆菌——但虫害压力大的时候,很难不用更强效的东西。”
→ 有机方法在压力下失效,有机认证岌岌可危。
“Tend 太复杂了,功能太多。要是能选自己需要的就好了。”
→ 现有软件是为大型农场设计的,不适合资源有限的小农场。
“给我日期、作物种类、发现的害虫,可能再加上在哪块地。这些就够了。”
→ 农民想要简洁、结构化的数据——而不是全面的仪表盘。
有机病虫害防控的
重担。
全球每年因病虫害损失 20–40% 的农作物。对有机农场而言,约束更为严苛:不能使用合成农药,一旦虫害压力激增,只能依靠劳动密集型手工方法,或承受减产损失。
令我们意外的是,问题不仅仅是消灭害虫——而是在损害可见之前知道它们在哪里。当农民走遍田间发现虫害暴发时,整排作物往往已经无法销售。
洞察 01
缺乏系统性追踪。害虫识别依赖直觉,没有记录暴发位置的固定方式,预防几乎无从谈起。
洞察 02
有机方法在规模化时失效。印楝油和苏云金杆菌在低压力下有效,但农民往往被迫在有机认证和保住收成之间二选一。
洞察 03
技术采用因复杂性而受阻。Tend 等工具被放弃,因为对小型农场而言,学习成本超过了收益。
为日常农民
而设计。
我们如何……
如何帮助有机农民以最小的精力监测和控制病虫害,同时保持环保和数据驱动?
核心需求
- 一套简单的可视化系统,无需走遍每块田地即可监测虫害暴发。
- 符合有机认证的非化学防控方式。
- 零培训、低成本的解决方案。
- 能随时间追踪病虫害防控效果的方式。
痛点
- 现有方案要么太贵,要么太复杂。
- 人工巡查耗时费力且不可靠,尤其在下雨天。
- 缺乏数据来理解病虫害的扩散规律和复发情况。
六个方案,
一个答案。
我们并不是一开始就想到机器人。我们先梳理了学术文献和现有技术,寻找科学可行且符合有机标准的方向,最终提出了六个基于不同干预逻辑的独立概念。
我们从 4 个维度评估每个方案




应用的
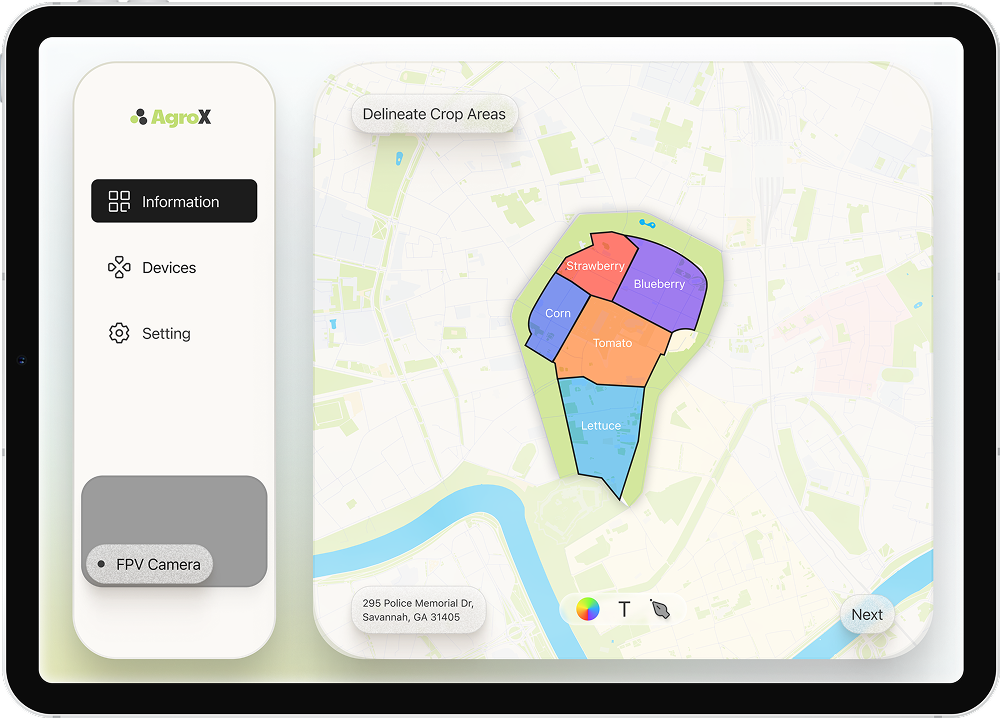
结构设计。
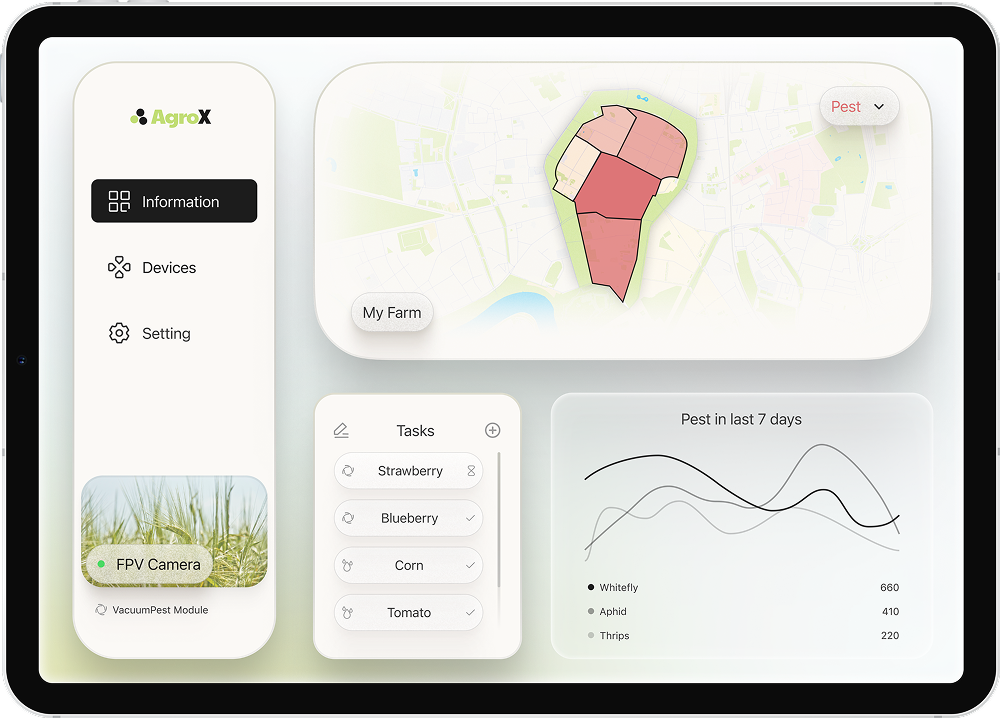
在设计界面之前,我们梳理了涵盖三个维度的完整应用结构:实时数据、设备控制和系统配置——最小化导航层级,以适应时间敏感的田间操作场景。

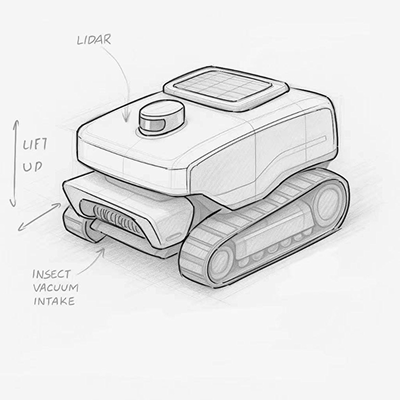
硬件与界面。
将技术需求转化为一台稳健的实体机器人,以及一套为农民设计的直觉化数字控制台。
AI 视觉害虫识别
机器人的车载摄像头实时扫描作物。AI 模型识别害虫种类和危害程度,并将数据记录到农民的控制台——无需人工巡田。
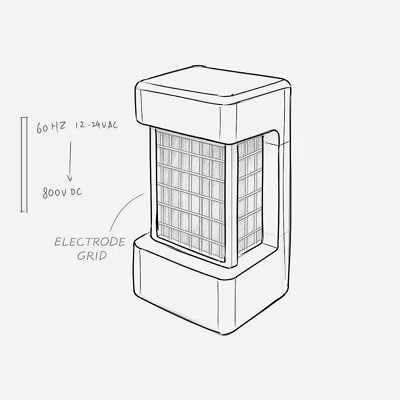
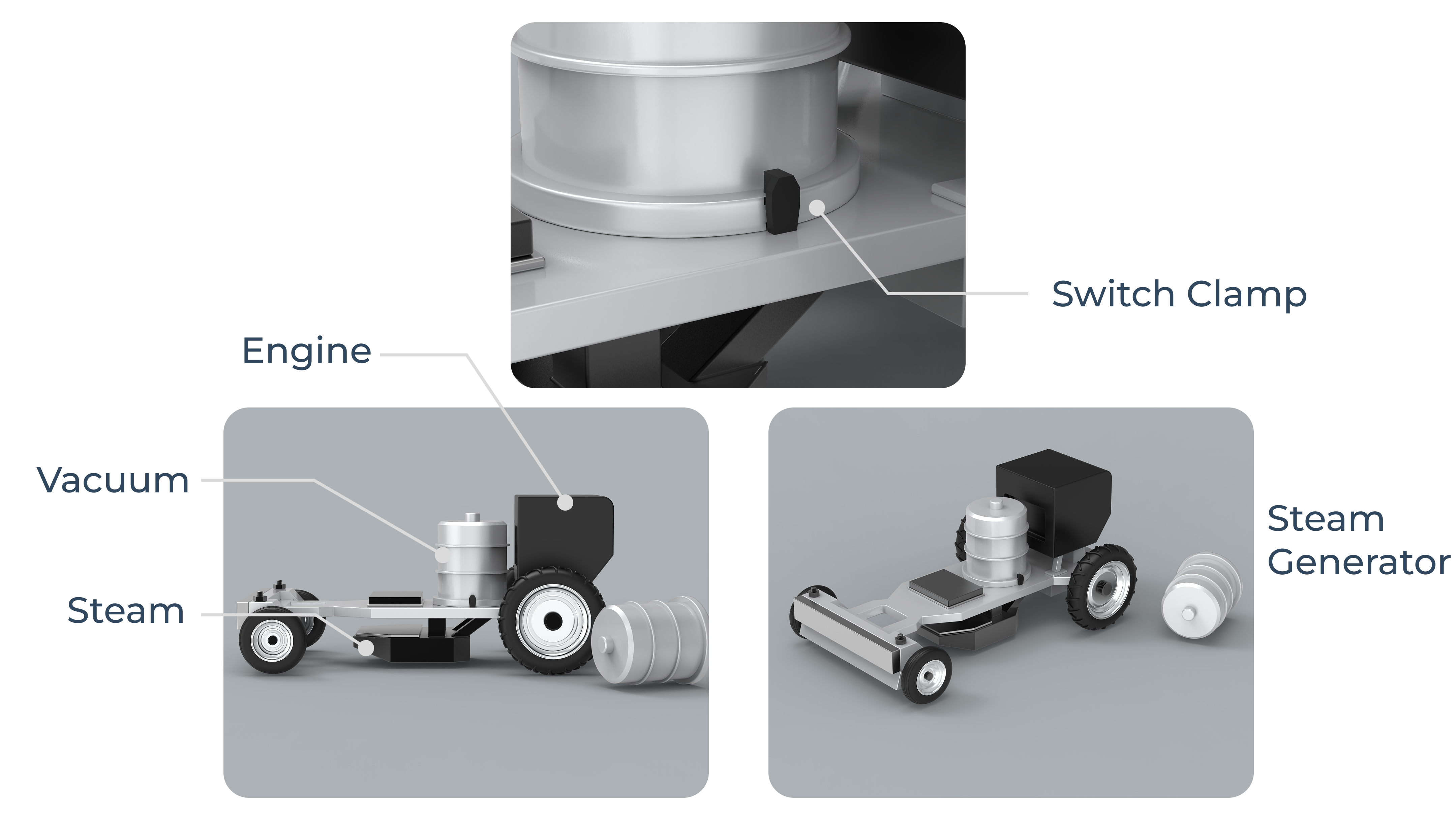
自主病虫害管理
部署后,机器人自主在农场内导航巡逻。结合真空吸虫(清除成虫)和蒸汽灭菌(处理土壤中的虫卵)两种方式,全程零化学品。
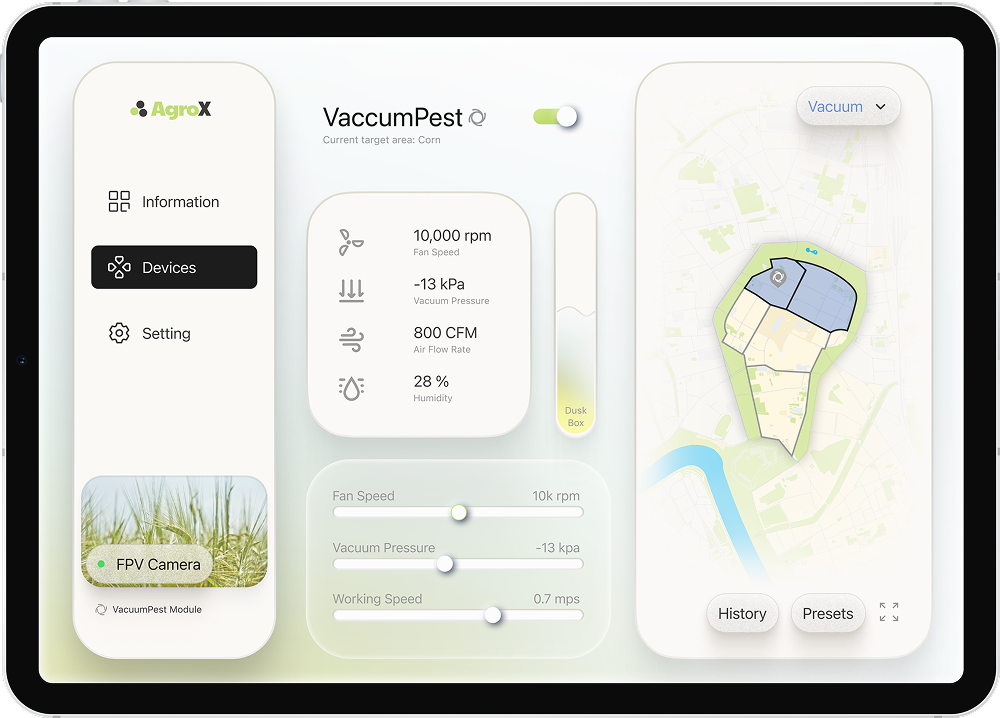
虫害热力图控制台
机器人采集的数据通过简洁的移动端和网页应用可视化呈现。农民可以即时看到农场哪些区域虫害压力较高,并随时间追踪机器人干预的效果。
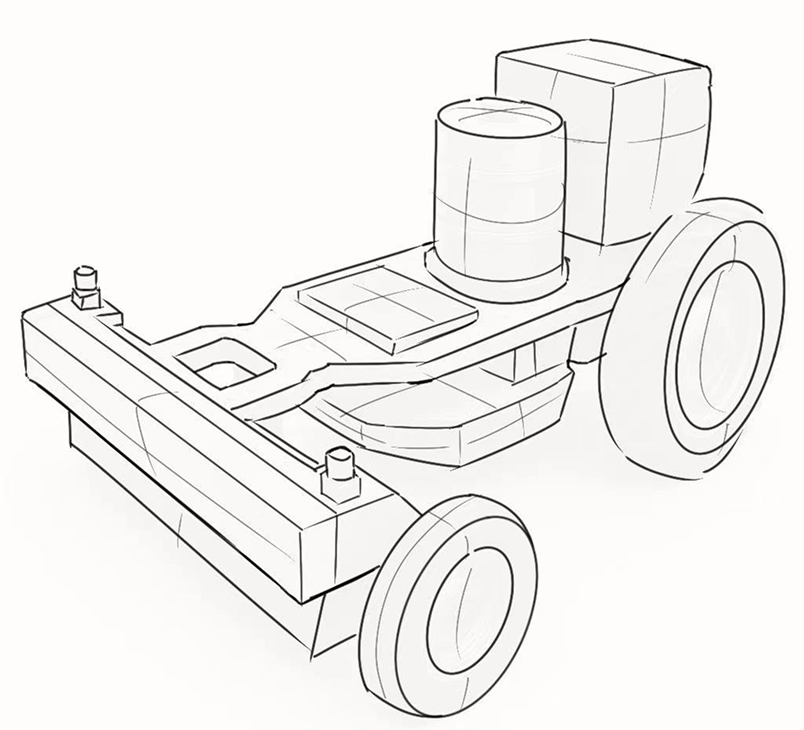
从草图到现实。
01. 草图

02. 高保真

03. 模型
我们学到了什么,
还有什么悬而未决。
硬件约束影响 UI 设计
真空和蒸汽模块无法同时运行——这个物理约束直接影响了设备状态 UI 的设计。模式需要明确且互斥,而不是隐藏在设置深处。
平板优于手机——研究驱动的决定
我们最初做的是手机界面。田间场景改变了我们的判断:戴着泥手套的农民需要更大的触控目标、在阳光下更好的可读性,以及能免手持放置的设备。iPad 成为主要平台。
尚未解决
AI 识别精度在弱光和密集植被条件下会下降——而这在真实农场中很常见。PestVision 的声音频谱分析可以作为视觉检测的补充,但我们没有时间验证模型。这是下一次迭代中最关键的开放问题。
用户采用尚未测试
我们为低技术熟练度用户设计,但从未与真实农民进行可用性测试。"研究中看起来直觉化"和"田间实际可用"之间的差距是真实存在的——我们清楚地知道这一点。